Uçuş süresince herhangi bir yer yüzeyi üzerinde bulunan nesnelere uçağa monte edilmiş cihazın gönderdiği kısa kızıl ötesi dalgaların(infrared) yeryüzeyine çarparak buradan yansıyan dalgaların bir fotodiyot ile toplanarak nesneden olan uzaklık hesaplanıp nesnenin şekli oluşturulur.
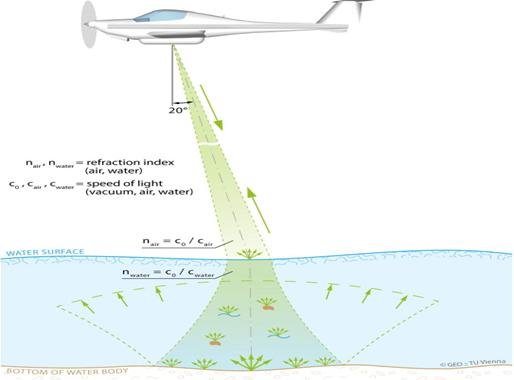
Şekil 1. Bir uçaktan ALS sisteminin gönderdiği sinyallerin gönderilmesi ve yansımış halinin gösterilmesi
ALS yöntemi ile nesnelerin taranması ile topografik bilgilerin ortaya çıkarılmasında kullanıldığı gibi arkeolojik bulguların da tespit edilen bir yöntemdir. Arazideki bitkisel örtünün tespit edilmesinde çok yaygın kullanılan bir yöntemdir.
LiDAR 2006 yılında Austrian Science Fund tarafından ‘LiDAR Supported Archaeological Prospection in Woodland’ adlı bir projede ilk kez kullanılmaya başlanmış olup ormanlık alanların tespit edilmesinde önemli bir kullanım alanı bulmuştur.
ALS taramasında elde edilen işlenmemiş ham veriler DSM (Digital Surface Model) ve DTM (Digital Terrain Model) e çevrilerek arazinin tanımlanmasında önemli bir rol oynar. Tarama anında her bir metrekarade 3- 8 nokta arasında bir çözünürlük elde edilebilir.
ALS sistemlerinde kullanılan algılayıcılar (sensörler) iki çeşittir. Bunlar konvansiyonel sensör ve tam dalga sensörler (full wave) dir. Konvansiyonel algılayıclar 4 farklı yansıma sinyalini nesne üzerinden detektörler ile alabilirler ve bu veriler 3 Boyutlu görüntü haline getirilir. Tam dalga sensörler ise 1 nanosaniyelik aralıklar ile havadan nesnenin taranması ile elde edilen sinyallerin bir detektörde toplanarak görselleştirilmesini sağlayabilirler.
Çok yaygın olarak kullanılan bir ALS cihazı olan RIEGL LMSQ560 cihazı Milan Flug Gmbh tarafından üretilmektedir. Bu cihaz havadan arazinin ölçümü için 0.6 metre hasassiyetine ve metrekare başına 25 nokta koyma kapasitesine sahiptir. Aşağıdaki grafiklerde gönderilen ve yansıyan sinyaller su yüzeyi, su ortamında bulunan herhangi bir nesne ve suyun dip kısımları olmak üzere gösterilmektedir.
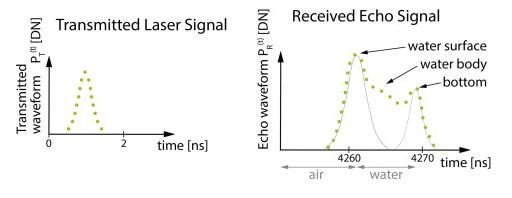
Şekil 2.Uçaktan gönderilen lazer sinyali, Fotodektörlerin yansıyan sinyali algılaması
Bu grafiklerden görüleceği üzere sinyal su yüzeyinden 4260 ns de dip kısmından ise 4270 ns sonra yansımıştır. Su içindeki herhangi bir nesneden ise yansıma süresi yaklaşık 4265 ns sonradır ki bu değer suyun içinde bazı nesneler olabileceğini göstermektedir.
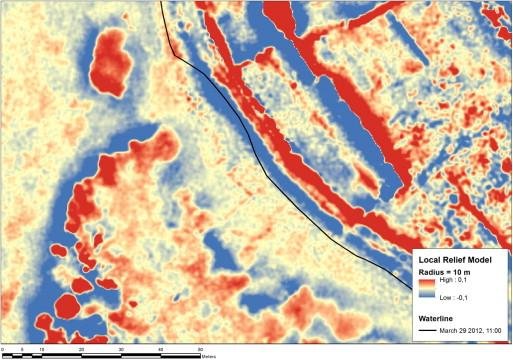
Bu nesnelerin büyüklüğü ise taraaması yapılan bu noktaların uygun yazılımlar kullanılarak bilgisayarlarda DSM ya da DTM yöntemleri kullanılarak görselleştirilmesi ile elde edilir. Bu taramanının bir çıktı örneği aşağıdaki görüntüdeki gibi olacaktır.
Not: Bu makalenin hazırlanmasında RIEGL den yararlanılmıştır.
ARKEOTEKNO
Sayfa Yorumları (0)
Yorum Bırakın